Description
Simulations based on models have proven successful in many areas such as automotive and aerospace industry, where the final goal is to create physical systems with the same behaviour as the models. However, as those systems get more sophisticated, the need for better modelling languages and simulation tools, as well as automatic transformation from the models into the target technologies, has become paramount. The goal of this Master Thesis is to build better tools and abstractions for modelling of scenarios involving autonomous robots with collaborative behaviour and distributed communication, including automatic code generation into different target platforms, like Python for Lego EV3 and the Arduino C-based language.
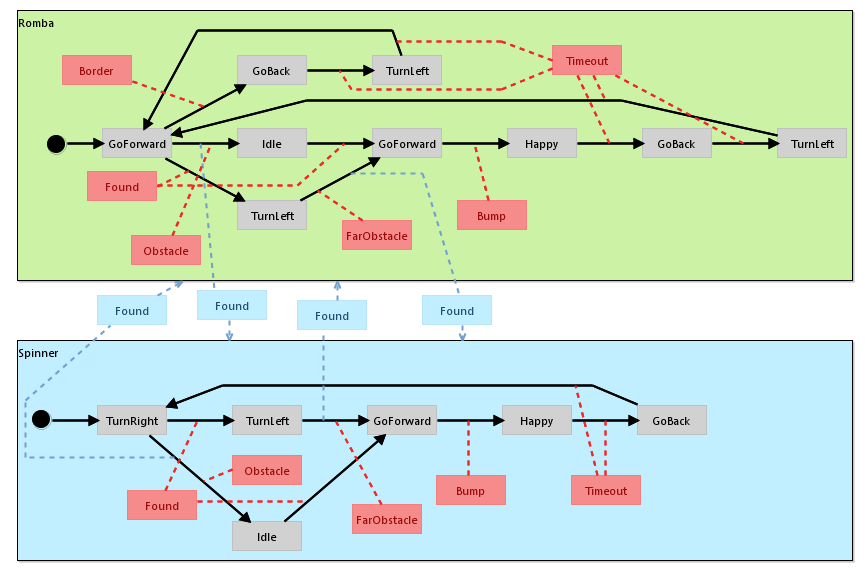
In earlier work, we have developed a modelling environment for Lego robots. Workflows with abstract actions are specified graphically, and can be deployed as Python code to a robot. It is also possible to coordinate several robots through WiFi or Bluetooth communication. See also CommonLang: A DSML for Robot Task Definition
Some of the already developed work allows the robots to explore their environment, sending messages about the obstacles and ground gaps that they find, allowing the creation of a 2D map of their surroundings.
There is also an ongoing work on the verification of temporal properties related to the robot behaviour at runtime, a discipline known as runtime verification.
Tasks
The ICT Engineering group also owns a set of Arduino robots. In this Master thesis, a prospective student should improve the modelling environment by performing the following tasks.
- Introduce additional useful abstractions for robot behaviour on a platform-independent level.
- Allow for the customization of the behaviour and code, based on the target platforms and the available hardware if the robots (sensors, motors, and actuators).
- Generate code automatically, based on the two previous definitions, for the target platforms.
Additionally, students may be interested in distributed cooperative systems of robots, or formal verification of the models according to correctness, energy consumption, or time constraints.
Publications
F. Macías, T. Scheffel, M. Schmitz, and R. Wang. Integration of runtime verification into meta-modeling for simulation and code generation. In Intl. Conf. on Runtime Verification (RV’16), volume 10012 of LNCS. Springer, 2016.
Related Projects
The new version of the modelling tool will be integrated with MultEcore.
Contact
| Volker Stolz – volker.stolz@hvl.no | Fernando Macías (PhD student) |
| Adrian Rutle – adrian.rutle@hvl.no | Rui Wang (PhD student) |